自動運転 Project #01
プロジェクト概要
Wing-AI Labでは本田技術研究所と共同で、人の意図や行動を理解し、コミュニケーションをしながら協調行動を行える協調人工知能(CI:Cooperative Intelligence)を搭載した自動運転車に関する研究開発を行っています。


協調人工知能のシステム構成
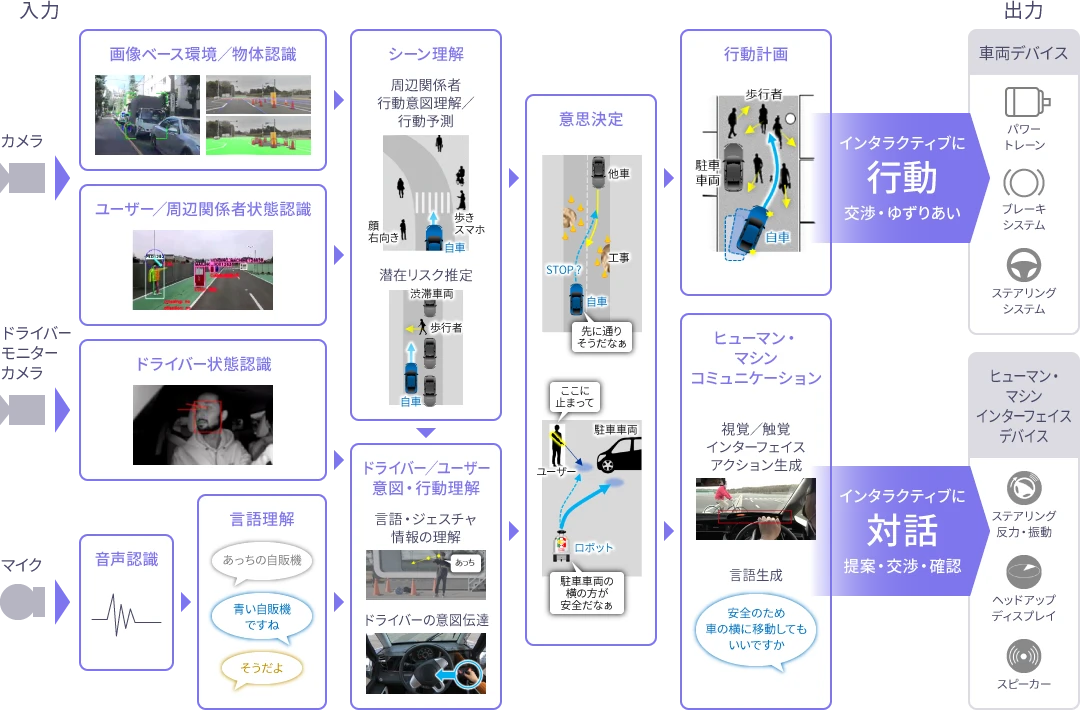
自律走行機能とヒューマン・マシンコミュニケーション機能が
融合した最先端人工知能
解決したい社会課題・背景
少子高齢化によるドライバー不足や高齢者の免許返納、運転への不安を抱える人など、移動に不自由を感じる人が増えてきています。観光地ではタクシー不足が発生したり、郊外では公共交通機関が縮小したりするなど、移動は大きな課題となっています。
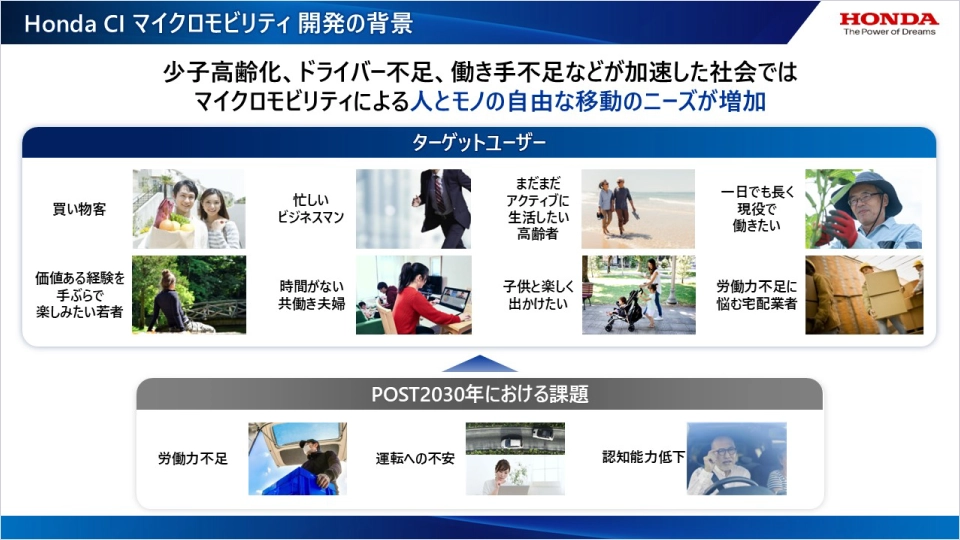
提供: 本田技術研究所
図:Honda CI マイクロモビリティ開発の背景
そうした課題に対して、“いつでも・どこでも・どこへでも”自由な移動を実現するマイクロモビリティ「CiKoMa(サイコマ)」の研究開発を進めています。下記に示す動画は、実環境を模擬したテストコースにてCiKoMaの自動走行を実証実験した際の動画になります。車両や歩行者を正しく認識して自動でコース内を走行出来ています。
CiKoMaは必要な時に呼んで乗車し、任意の場所で乗り捨てという利用を想定しており、例えば駅や自宅の周辺から乗って商業エリアで乗り捨てることが出来れば、気軽に観光や買い物に行くことができるようになります。
本プロジェクトでは、CiKoMaが街中を無人で自在に走り回るための完全自動運転技術の実現を目指しています。
動画:CIマイクロモビリティ「CiKoMa」 技術実証実験
※画像をタップすると動画が再生します。
技術的アプローチ・研究内容
自動運転には高精度地図を利用するのが一般的ですが、本プロジェクトでは高精度地図に頼らず、人間のように視覚情報をメインとした走行技術を開発しています。高精度地図が不要なため、決まった経路以外であっても“どこでも”自由に移動を楽しむことが出来ます。
Wing-AI Labでは、自動運転技術の中でも主に認識機能の実装に取り組んでいます。認識機能では、物体検出用DNNモデルや走路認識用DNNモデルの出力を用いて、人や車といった動的物体や、道路構造を認識しています。現実環境で自動走行を実現するためには、これら認識機能の精度向上に加え、リアルタイムで動作させるための高速化が重要となります。
ここでは、走路認識の改善技術について紹介します。走路認識用DNNは、大量の公道環境データで学習されていますが、未知の物体が登場した場合には、新規クラスとして追加学習を行う必要があります。しかし、追加学習には、
・DNNモデルのパラメータ更新による既存クラスの性能低下
・学習用アノテーションにかかる工数増大
という大きな課題があります。
そこで、効率的に追加学習を行うために、新規クラスのみをアノテーションし、既存クラスの精度低下を抑制する追加学習手法を検討しています。例えば、図の赤枠で示す丸い石を新規クラスとして追加する場合、従来手法では走路・白線・フェンス・木・生垣など、認識対象となる全ての物体をアノテーションする必要がありました。これに対し、我々は 対象物体(新規クラス)のみをアノテーションして追加学習を行う方式を採用しています。また、新規クラスを学習してモデルパラメータを更新する際には、既存モデルのパラメータを蒸留しながら部分的に更新し、さらに既存クラスと新規クラスの損失バランスを調整することで、既存クラスの精度を維持したまま新規クラスを高精度に認識可能な追加学習を実現しました。
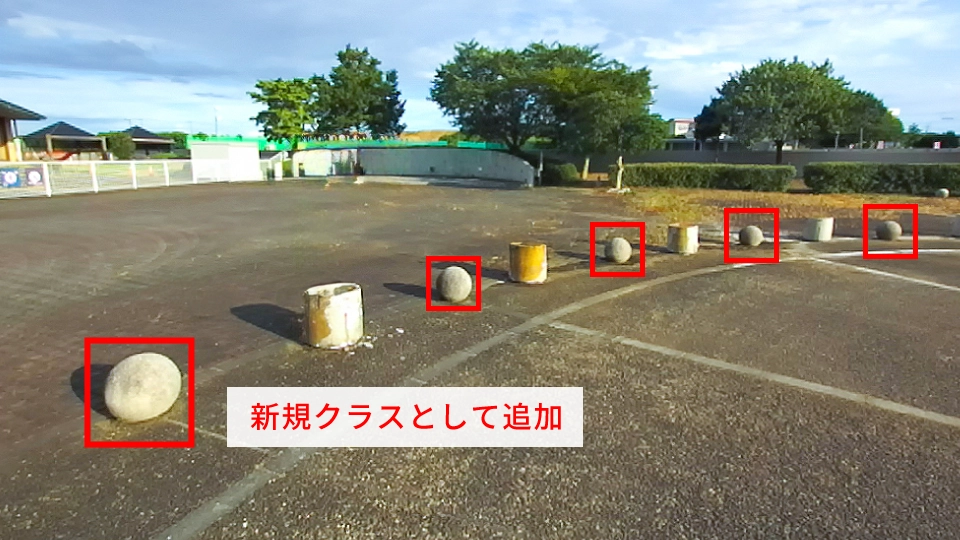
図:新規クラスのアノテーション例
続いて、高速化技術について紹介します。
高速化の取り組みとしては、DNNモデルの量子化や蒸留によるモデル軽量化、CPU処理のGPUへの移行など一般的な最適化に加え、モデル間の並列化や処理スケジューリングの工夫も行っています。
例えば図のケースでは、複数のDNNがシーケンシャル(直列)に実行されています。高速化の選択肢としては、4つのDNNを単純に並列実行する方法が考えられます。しかし実際に並列化しても、全体の処理時間は改善されませんでした。これは、CPU/GPUのコア数や各処理モジュールの負荷状況を踏まえずに並列化しても、リソース競合が発生することが原因です。
そこで、図中②のように 複数のDNNモデルをバッチ処理で同時に実行させる方式に変更したところ、約20msの高速化が得られました。さらに、処理順序の依存関係(例:Post1はDNN1の後で実行する必要がある)を考慮しつつ、図中③ではDNN2とPost2を並列化することで、最終的に約40msの高速化を実現しました。
このように、採用するハードウェアの特性や各機能の処理負荷、モジュール間の依存関係を十分に理解した上で、最適な並列化とスケジューリングを行うことで、効率的な高速化を達成しています。
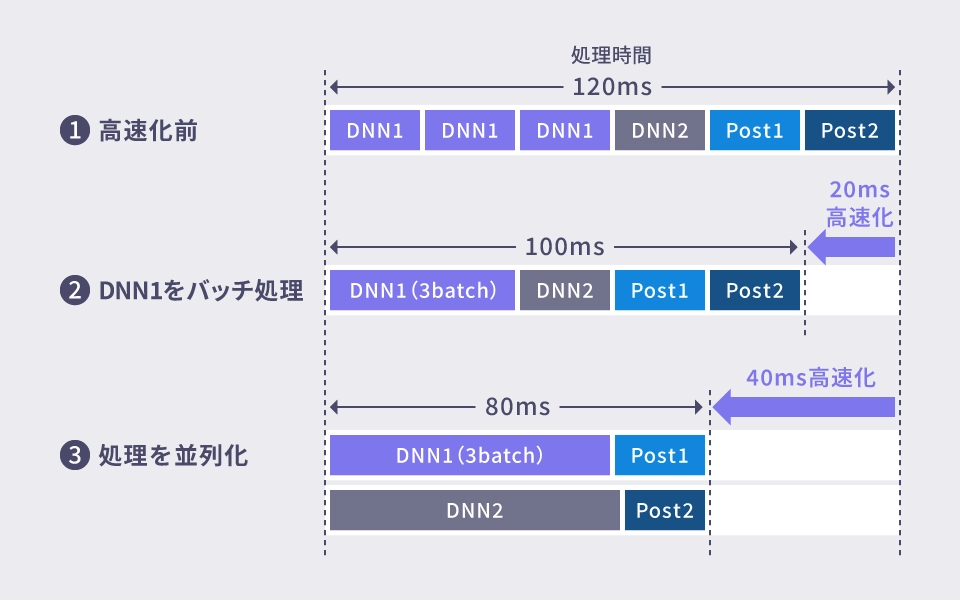
図:高速化の適用例
以上のように、現実環境で自動運転システムを安全かつ安定的に動作させるため、私たちは認識精度の向上と高速化を中心とした多くの技術課題に取り組んでいます。これらの課題に対しては、最新の研究動向を継続的にキャッチアップしながら、それらを実機環境へ適用するための工夫と改善を積み重ねています。研究と実装、理論と現場をつなぎ合わせることで、より信頼性の高い自動運転認識システムの実現を目指し、今後も研究開発を進めていきます。
また、完全自動運転を円滑に運行するには遠隔監視機能が欠かせません。道路上に設置したカメラでCiKoMaを検出して走行に問題がないかを確認し、車両内部のカメラ・マイクにより乗客の様子を見守るなど車両を内外部から観察し、何かあれば監視員に画像や音声で適切に状況を通知します。Wing-AI Labでは遠隔監視に関する研究開発も行っております。
《関連リンク》
PROJECT「遠隔監視」
主な成果・特徴
アグリサイエンスバレー常総内の「道の駅常総」で自動運転の実証実験を実施しています。「道の駅常総」から観光農園「グランベリー大地」近くまで(約850メートルの区間)、一般のお客様に向けて自動運転車「CiKoMa」の乗車体験を実施しています。
《関連リンク》
常総市の一般向け自動走行技術実証実験
今後の展望
現在、常総市や小田原市の一般道における自動運転を目標に実証実験を進めています。実証実験を足がかりにして、いつでも・どこでも・どこへでも移動可能な自動運転技術を実現していきます。